摘要
本文记录读源码前查看的一些资料,以及读源码遇到的疑惑的解答。
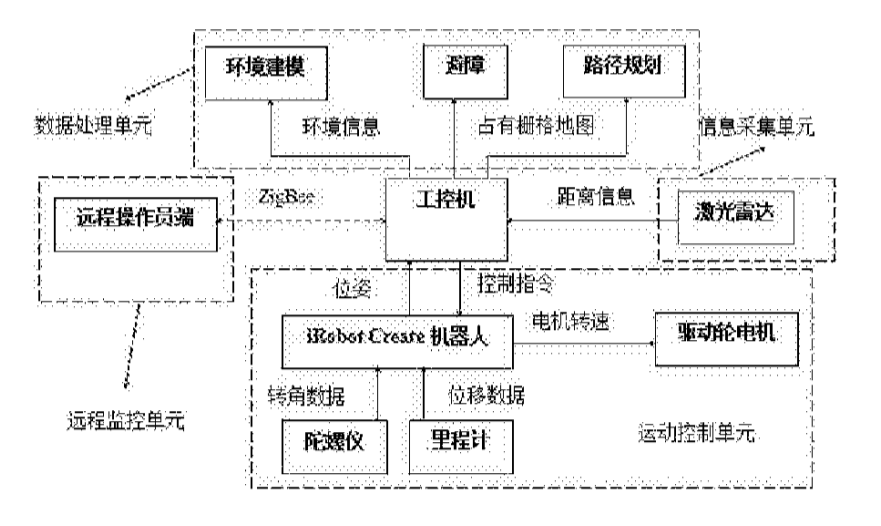
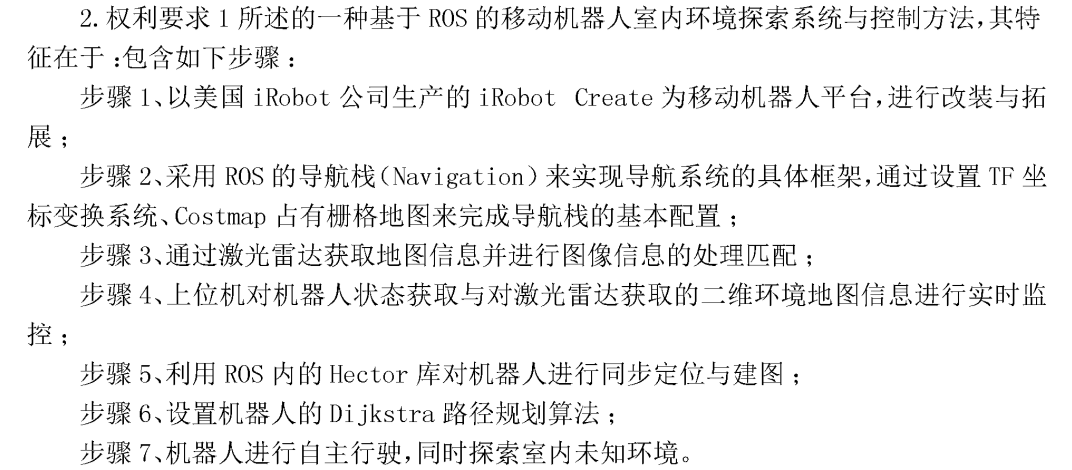
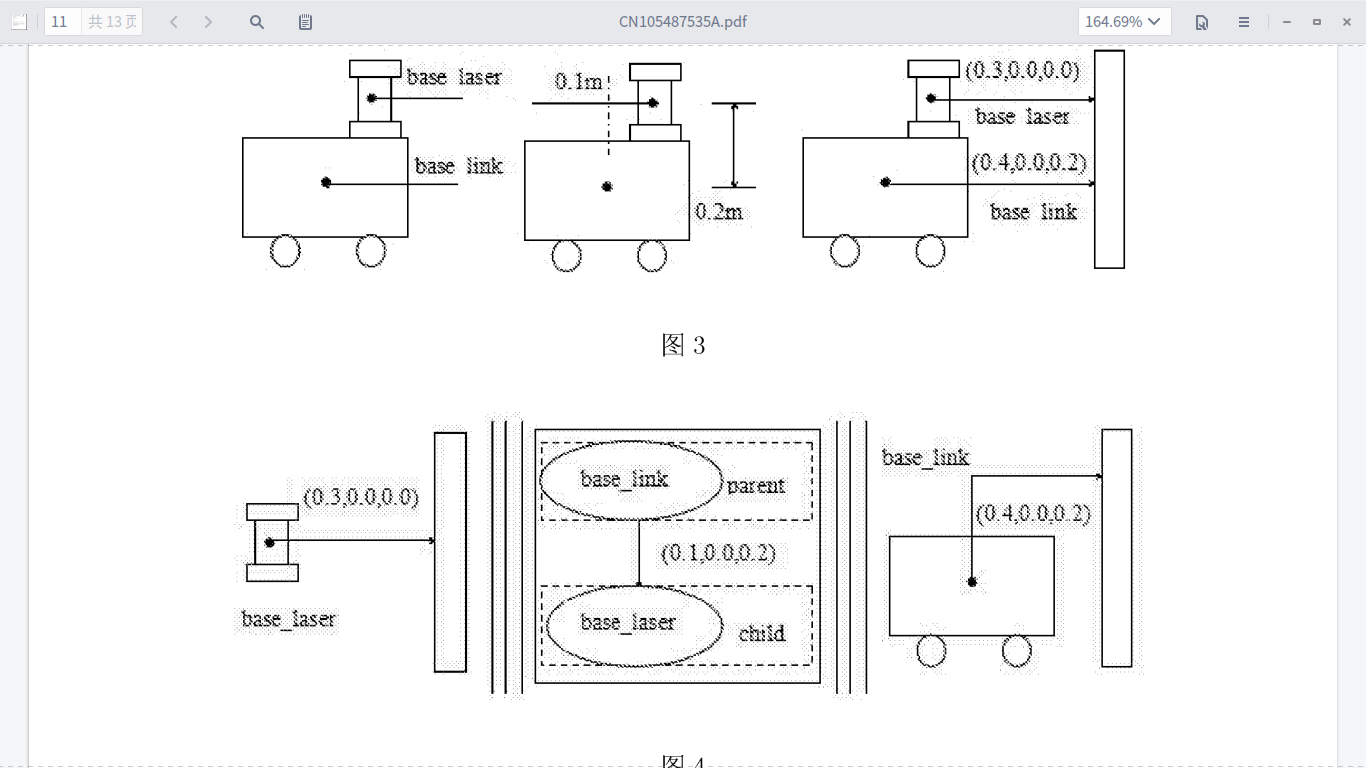
(1)引用专利申请书:CN 105487535 A
ZigBee的特点:
低功耗、低成本、低速率、近距离、短延时、高容量、高安全
(2) 引用博客
(3) 回调函数
在看源码的时候,看到大量的class中实现的方法有好大一部分是属于回调函数,所以补充学习了一下。回调函数的机制主要继承于C语言。基本道理很简单,一般来说,我们在一个系统上写的都是application,可以使用系统给我们提供的API;然而,在实现应用的时候,我们实现了一个函数被系统调用,或者说系统在提供一个API给我们的同时要求我们传入一个函数,这样的函数就叫做回调函数。
为什么需要使用回调函数呢?使用回调函数可以提供极大的灵活性以及适应性。比如说,系统提供了某一个功能的接口,但是这个功能的实现需要对数据进行排序,所以需要调用一个排序函数,但是系统不提供这个排序函数,而是要求应用者传入一个排序函数。这时候,使用者就可以根据具体的运算量,硬件的计算能力,延时要求等等条件,选择实现一个能够较好的满足各个需求的算法。如果系统本身直接某个某个排序算法,则可能无法兼顾实际上使用时候的一些要求。
(4) ROS::spin()
在看源码的时候,几乎main函数中必有这个spin()。于是查看了相关的内容。其实这个函数是ROS消息回调函数。还有ROS::spinOnce()。两者区别在于前者调用后不会再返回,而后者在调用后还可以继续执行之后的程序。因此,在初始化时已经设置好所有消息的回调,并且不需要其他背景程序运行的情况下就使用ROS::spin();仅仅使用回调不足以完成任务,还需要其他辅助程序的执行:比如定时任务、数据处理、用户界面等,就使用ROS::spinOnce()。
总体来说其原理是这样的:除了用户的主程序以外,ROS的socket连接控制进程会在后台接收订阅的消息,所有接收到的消息并不是立即处理,而是等到spin()或者spinOnce()执行时才集中处理。所以为了保证消息可以正常接收,需要尤其注意spinOnce()函数的使用 (对于spin()来说则不涉及太多的人为因素)。
必须关注到的是,使用了ROS::spin()之后,每次消息到达时会执行用户的回调函数进行操作,相当于程序是消息事件驱动的。这才解开了一个困惑我的问题:可以看到源码的main函数是这样的: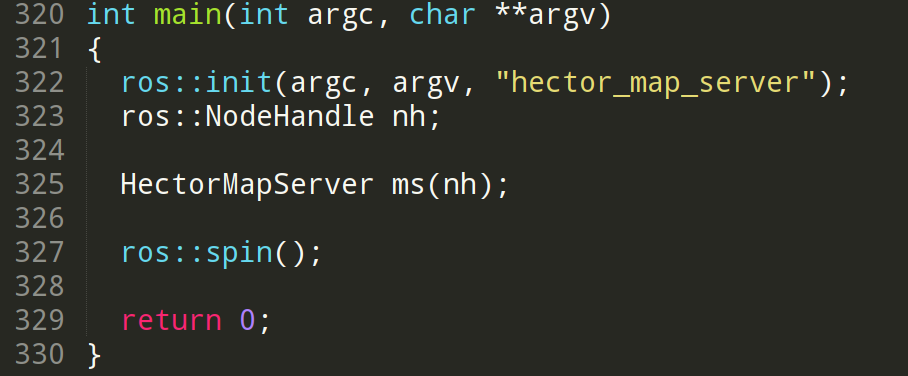
这样的main函数,新建了一个类的对象,但是并没有调用到任何的成员函数啊,这样的main函数有什么意义?噢,原来ROS::spin()使得这个函数变为了消息事件驱动的,意思就是,有消息过来,就调用这个对象中相应的回调函数。
更具体的内容可查ROS官网或者是ROS的消息回调处理:ros::spin()与ros::spinOnce()