概念理解
ROS下的单位和坐标
直角坐标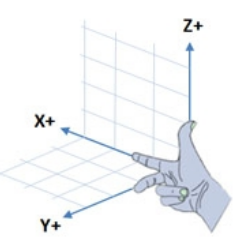
旋转
单位:线速度(m/s) 角速度(rad/s) 室内一般不超过0.2m/sodometry
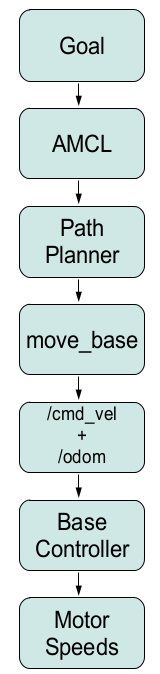
需要记住,无论使用了多少个source,odometry都会与真实的值有差距。base controller
包括driver和PID控制器。发布通过/odom frame 到 base frame。某些机器人会使用robot_pose_ekf包对机器人进行更加精确的控制。
有了base controller之后,我们就可以使用ROS提供给我们的命令行工具以及使用ROS的节点发布消息的方式,在一个比较高的层级对对机器人进行控制。我们不再关心这个机器人的使用什么硬件,我们只是单纯的关注机器人在现实中的线速度和角速度的大小,所以只要控ROS的接口即可。SLAM package
跟base controller类似,我们也可以在一个较高的层级控制机器人进行建图,只需要我们在ROS环境中添加gmapping package,这个包最好匹配使用激光雷达,也可以使用kinetic和Asus Xtion depth camera。同时,我们可以通过amcl package(Adaptive Monte Carlo Localization)使得机器人能够根据当前的地图信息(current scan)和测量数据(odometry data)自动定位,在地图上点击一个位置,机器人会自动寻路过去并自动避障。架构
原理理解
常用操作
prepare environment
1
2
3
4
5
6
7
8
9sudo apt-get install ros-indigo-turtlebot-bringup \ros-indigo-turtlebot-create-desktop ros-indigo-openni-* \ros-indigo-openni2-* ros-indigo-freenect-* ros-indigo-usb-cam \ros-indigo-laser-* ros-indigo-hokuyo-node \ros-indigo-audio-common gstreamer0.10-pocketsphinx \ros-indigo-pocketsphinx ros-indigo-slam-gmapping \ros-indigo-joystick-drivers python-rosinstall \ros-indigo-orocos-kdl ros-indigo-python-orocos-kdl \python-setuptools ros-indigo-dynamixel-motor-* \libopencv-dev python-opencv ros-indigo-vision-opencv \ros-indigo-depthimage-to-laserscan ros-indigo-arbotix-* \ros-indigo-turtlebot-teleop ros-indigo-move-base \ros-indigo-map-server ros-indigo-fake-localization \ros-indigo-amcl git subversion mercurial
cd ~/catkin_ws/src
git clone https://github.com/pirobot/rbx1.git$cd rbx1$git checkout indigo-devel
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash
rospack profile
udo apt-get install ros-indigo-arbotix-*
sudo apt-get install ros-indigo-laser-* ros-indigo-hokuyo-nodePackages

Goal
First example: helloWorldNavigation_movebase
1
2
3
4
5roslaunch rbx1_bringup fake_turtlebot.launch
roslaunch rbx1_nav fake_move_base_blank_map.launch
rosrun rviz rviz -d `rospack find rbx1_nav`/nav.rviz
rostopic pub /move_base_simple/goal geometry_msgs/PoseStamped \'{ header: { frame_id: "map" }, pose: { position: { x: 1.0, y: 0, z: 0 }, orientation: { x: 0, y: 0, z: 0, w: 1 } } }'
rosstopic pub /move_base_simple/goal geometry_msgs/PoseStamped \'{ header: { frame_id: "map" }, pose: { position: { x: 0, y: 0, z: 0 }, orientation: { x: 0, y: 0, z: 0, w: 1 } } }''
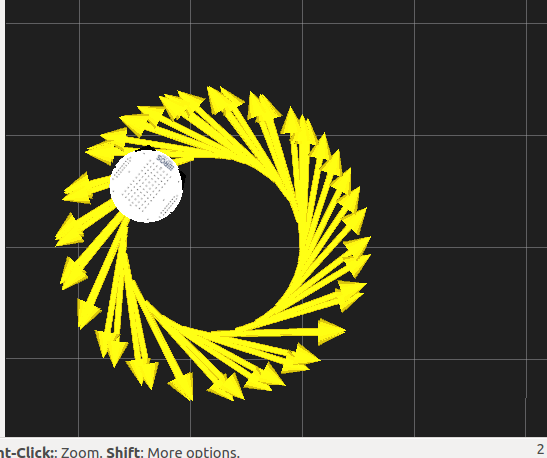
Point And Click:使用鼠标点击左下角的reset按钮可以清除之前的轨迹,再点击右上方的2D Nav Goal按钮,就可以使用鼠标再地图上指定目标。
- Second example: helloWorldNavigation_AvoidingObstacles
1
2
3
4
5roslaunch rbx1_bringup fake_turtlebot.launch
rosparam delete /move_base
roslaunch rbx1_nav fake_move_base_map_with_obstacles.launch
rosrun rviz rviz -d `rospack find rbx1_nav`/nav_obstacles.rviz
rosrun rbx1_nav move_base_square.py
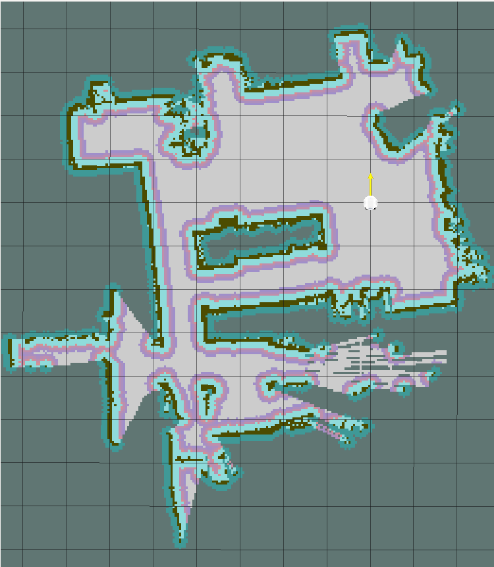
Third example: helloWorldGmapping
1
2roslaunch rbx1_bringup turtlebot_minimal_create.launch
rosrun rviz rviz -d `rospack find rbx1_nav`/fake_laser.rvizFourth example: helloWorldGmapping_record&create
1
2
3
4
5
6
7roslaunch rbx1_bringup turtlebot_minimal_create.launch
roslaunch rbx1_nav gmapping_demo.launch
rosrun rviz rviz -d `rospack find rbx1_nav`/gmapping.rviz
roslaunch rbx1_nav keyboard_teleop.launch
roscd rbx1_nav/bag_files
rosbag record -O my_scan_data /scan /tf
rosrun map_server map_saver -f my_map
备注:对于大量数据的时候,使用use_sim_time控制1
2rosparam set use_sim_time true
rosparam set use_sim_time false
- Fifth example: helloWorldAmcl
1
2
3roslaunch rbx1_bringup fake_turtlebot.launch
roslaunch rbx1_nav fake_amcl.launch map:=test_map.yaml
rosrun rviz rviz -d `rospack find rbx1_nav`/amcl.rviz
问题解决
在新终端下没有进行source
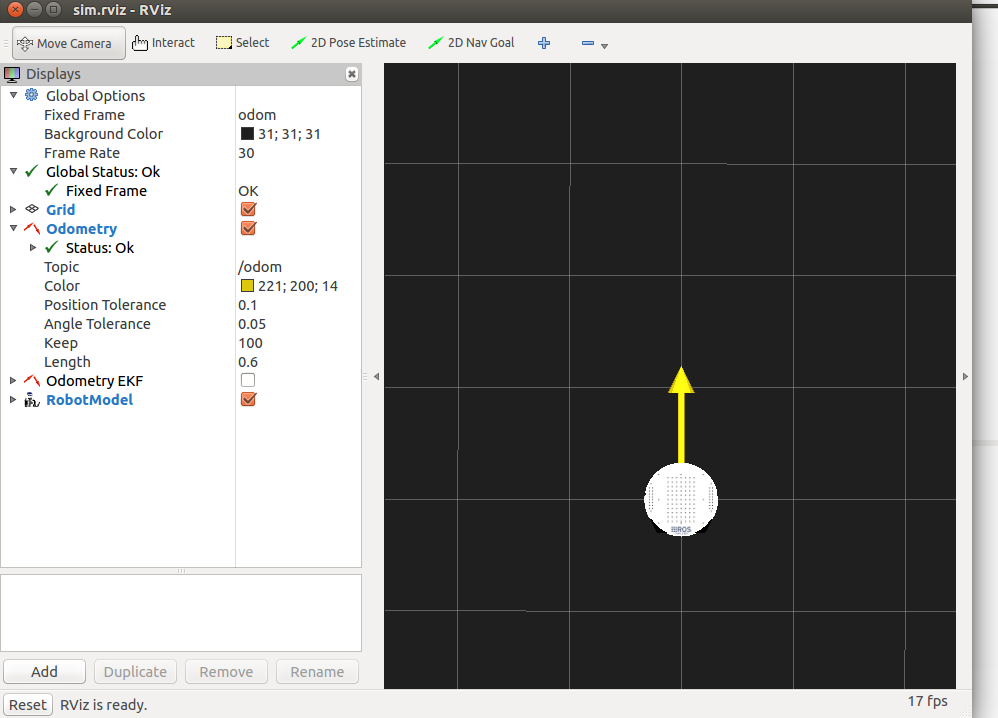
- Testing the Simulator出现的现象
运行:1
2roslaunch rbx1_bringup fake_turtlebot.launch
rosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz
看到的是: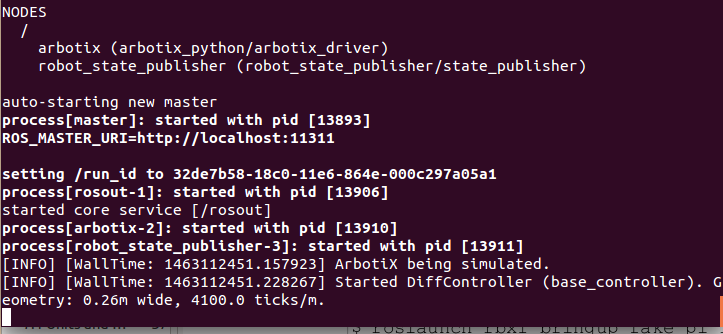
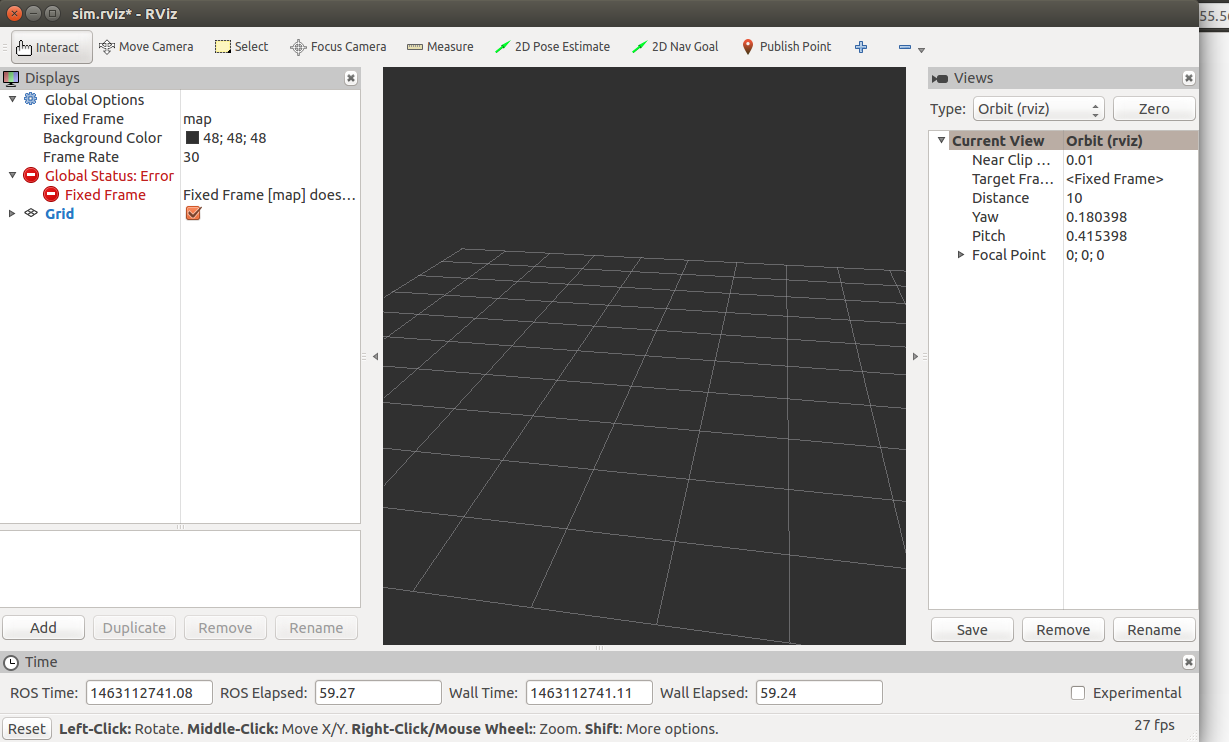
可以看到,并没有出现预期会存在的机器人。
- 分析
看到命令行中使用了rospack find,所以可以想到应该是需要source才行,所以,运行了1
source ~/catkin_ws/devel/setup.bash
再重复上述之前的两条,可以得到正确的运行。